






Казанские ученые обучат робота ходить по лестнице самостоятельно

Как роботу быть независимым от оператора в движениях и действиях — задача, которую решают ученые Казанского (Приволжского) федерального университета (КФУ). Сейчас они работают над алгоритмом для мобильного робота «Инженер» отечественной компании «Сервосила». Задача ученых — научить машину автономному преодолению лестницы. Разработчики уже запрограммировали «Инженера» на возвращение к оператору в случае потери связи и отлаживают навык самостоятельного открытия дверей.
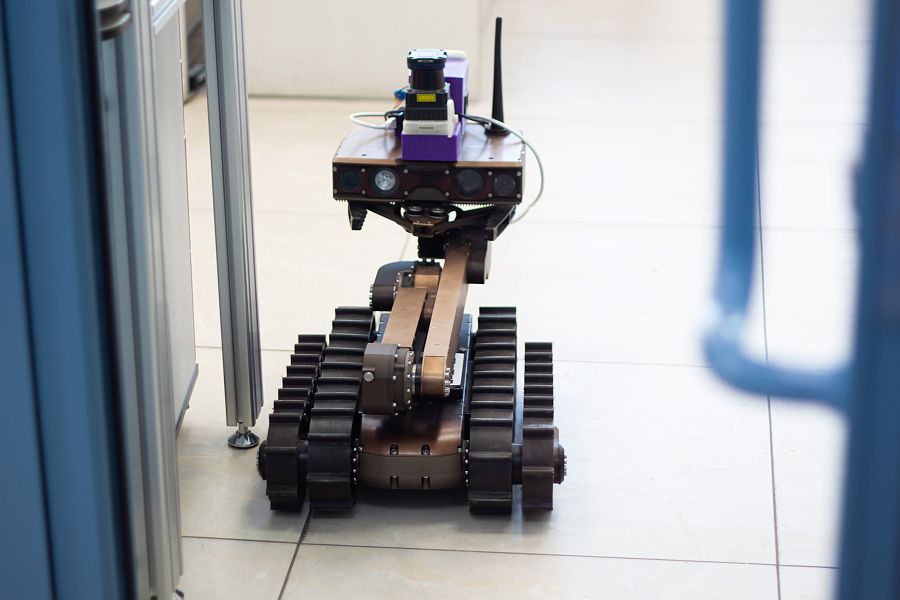
«Инженер» — мобильный маловесный робот для использования в труднодоступных местах. Он может применяться в образовательных и научных исследованиях, пожарных и спасательных службах, инженерных и эксплуатационных работах, на опасных производствах, а также в туннелях и шахтах. Ученым доставили «Инженера» с предприятия, чтобы они обучили его ряду действий, заложенных конфигурацией, и загрузили необходимые программы. Робот приехал в КФУ в комплекте с пультом-джойстиком для управления в ручном режиме, из предустановленных функций — получение данных только с одной из четырех имеющихся камер.









В лаборатории интеллектуальных робототехнических систем (ЛИРС) КФУ специалисты занимаются доработкой и совершенствованием возможностей как самого робота, так и коммуникации с ним. В том числе «учат» быть независимым от оператора в движении и действиях. Разработчики уже создали несколько видов графических интерфейсов для управления роботом как с компьютера, так и с мобильного телефона.
«На робота мы установили робототехническую операционную систему ROS, которая позволяет реализовывать различные алгоритмы, включая алгоритмы навигации и картографирования, благодаря которым робот может самостоятельно ориентироваться в пространстве, строить двухмерную карту окружающего мира, а также прокладывать маршрут к цели, избегая разного рода препятствия», — рассказал руководитель ЛИРС Евгений Магид.
Алгоритм по автономному преодолению лестниц может быть использован в качестве дополнительного инструмента при управлении роботом как в режиме телеоперации (то есть, при удаленном управлении человеком-оператором через разработанные графические интерфейсы), так и в автономном режиме. Так, при помощи бортовых камер и лазерного дальномера робот самостоятельно определяет лестницу перед собой, высоту и количество ступеней. Далее он рассчитывает, как правильно поднять передние дополнительные гусеницы и динамически менять положение манипулятора с головой робота, чтобы при подъеме или спуске по лестнице не произошло опрокидывания робота.
Лаборатория КФУ в основном занимается обучением «мозга» робота — созданием новых протоколов взаимодействия, алгоритмов и программированием. Ученые составляют виртуальные модели робота в симуляторах Gazebo и Webots. Эти модели позволяют апробировать новые алгоритмы и программное обеспечение еще до переноса их на реальный объект, что снижает время разработки и увеличивает безопасность ученых. Результаты работы специалисты КФУ представили на конференции SIBCON.
В команду разработчиков входят как сотрудники, так и студенты ЛИРС. Значительное число проектов начинается как студенческие курсовые и дипломные работы, которые в дальнейшем дорабатываются учеными для лучшей интеграции в уже имеющиеся системы управления роботов. Уже имеется свыше 140 проектов различного масштаба и уровня сложности, пять из которых открыты для свободного использования научным сообществом и доступны по ссылке.


